





グローバルロボット関連
教育、研究用オープン・プラットフォーム・ヒューマノイド
DARwIn-OP ダーウィン オーピー
Dynamic Anthropomorphic Robot with Intelligence - Open PlatForm
DARwIn-OP DeluxEdition[日本仕様]・・・価格:Webshop掲載
DARwIn-OP AcademicEdition[アカデミック版]・・価格:Webshop掲載
※2015年2月より日本国内販売価格がアップとなりました。依然、Webに旧価格を掲載しているリセラーがあります。ご注意ください。
送料・・・サービス
納期・・・3~5週間 e-mail: info@machinedesign.co.jp
・調整済み完成品ロボット、サンプルプログラム登録済み
・バッテリー、充電器付属
・工具、補修部品付属
last update:2015.3.4
DARwIn-OPは小型LinuxPCとHDカメラをはじめとした各種センサーを搭載し、演算、センシング能力をもった「歩くコンピュータ」です。Dennis Hong博士率いるバージニア工科大学RoMeLa (Robotics & Mechanisms Lab)が開発したDARwInシリーズをベースにアメリカ合衆国内に国立科学財団 (NSF)による出資のもと、バージニア工科大学、パデュー大学、 ペンシルバニア州立大学、ROBOTIS社によって誕生したのがDARwIn-OPです。関節のアクチュエーターにはDynamixel MX-28Tを採用し高い運動性能と搭載能力を達成。その実力はROBO CUP世界大会 小型ヒューマノイドリーグで2011年から2013年まで3連覇の成績を収めていることで証明されています。
DARwIn-OP インフォメーション
→公式 DARwIn-OPカタログ(PDF)![]()
■DARwIn-OP e-manual (電子マニュアル)
http://support.robotis.com/jp/techsupport_jpn.htm# product/darwin-op.htm
■オープンコミュニティーサイトROBOT SOURCE
http://www.robotsource.org/
■「ヒューマノイドオープンプラットフォームの黒船『DARwIn-OP』日本上陸」
オーム社 ロボコンマガジン2012年3月号に弊社執筆のDARwIn-OP紹介記事が掲載されています。
http://www.ohmsha.co.jp/robocon/archive/2012/02/robocon-magazine-20123.html
■SI2013神戸のオーガナイズドセッション「2G1 次世代ロボット共通プラットフォーム技術」にて弊社社長の杉浦富夫が「ヒューマノイドプラットフォーム『DARwIn-OP』の紹介」を発表しました。
http://www.si-sice.org/si2013/
主な仕様
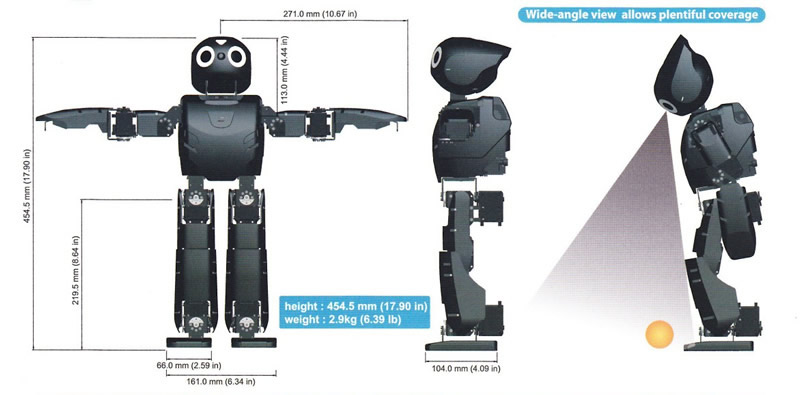
■身長:454.5mm
■重量:2.9kg
■ビルトインPC:「FitPC」
CPU:1.6GHz intel ATOM Z530 / メモリ: オンボード 4GB SSD
■ロボットコントローラ:「CM-730」
CPU:ARM CortexM3 STM32F103RE 72MHz
■自由度:20DOF
片腕3DOF(肩ピッチ、肩ロール、肘ピッチ)
片足6DOF(股間ヨー、股間ロール、股間ピッチ、膝ピッチ、足首ピッチ、足首ロール)
首2DOF(パン、チルト)
■アクチュエーター:「Dynamixel MX-28T」 ✕20個
ストールトルク:24kg-cm(12V時) / 無負荷スピード:54rpm(12V)
分解能:12bit(4096step) / ギヤ比: 193:1 / 動作範囲:360度
プロトコル:Dynamixel TTL(3線式半二重非同期シリアル通信、8bit,1stop, No Parity)
ギヤ材質: 全段金属ギヤ/ フィードバック機能:位置、温度、負荷(電流)、入力電圧, etc
オーバーロード、オーバーヒート, etc保護機能搭載
マグネティックアブソリュートエンコーダ、マクソンモータ採用
■Dynamixel通信速度: 1Mbps
■電源: 交換式リチウムポリマーバッテリー 11.1V 1000mAh / 12V5A 安定化電源 (併用可能)
電池3本付属、安定化電源付属
■電池での駆動時間:約30分 ※プログラム開発などサーボを頻繁に動かさない場合
■センサ類:ジャイロセンサ(3軸)、加速度センサ(3軸)、本体ファンクションボタン×3、USBカメラ(HD)
ステレオマイク、スピーカー
■拡張用インターフェース:HDMI端子、USB×2、LAN

オールインワンパッケージ
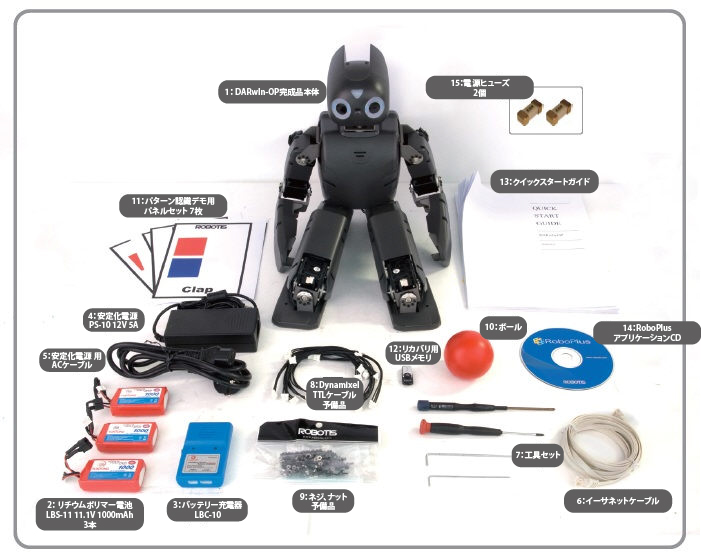
ロボットは調整済みの完成品で画像認識用のHDカメラ、姿勢・運動検知用の加速度センサーやジャイロセンサー、ステレオマイク、スピーカーなど必要なものは全てパッケージングされています。 出荷時にサッカーデモ(IK歩行、ボールトラッキング)、インタラクションデモ(パターン認識)など複数のサンプルプログラムが登録されており、箱から出してすぐにデモを行うことが可能です。


X86ベースのスピンドルレスミニコンピューターFitPC(CPU:Atom Z530)を搭載、ロボット本体からHDMI、USB×2、LANによるデバイスの拡張が可能です。
HDMI端子にディスプレーを、USBにマウスやキーボードを接続すれば外部に別にPCを用意しなくても、ロボット内部の開発環境で開発が可能です。
ハードウェアとソフトウェアの双方が完全にオープンソース。

機械ハードウェアのCADデータ、電気ハードウェアの各種情報、そしてソフトウェアのソースなど豊富な、そして必要な情報が無償で手に入るため、教育、研究用のプラットフォームとして最適です。 現在、全世界のロボット研究者、愛好家がDARwIn-OPを用いた研究を行っており、その成果を発表しています。
オープンコミュニティーサイトROBOT SOURCE: http://www.robotsource.org/
高い拡張性
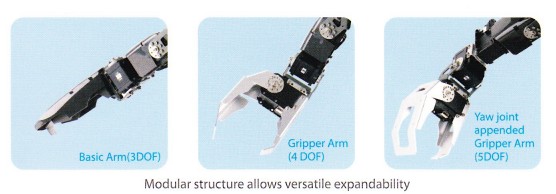
オフィシャルで最大5自由度まで腕の自由度の拡張をサポートしています。ロボットコントローラー「CM-730」の仕様上、これ以上の拡張も可能です。
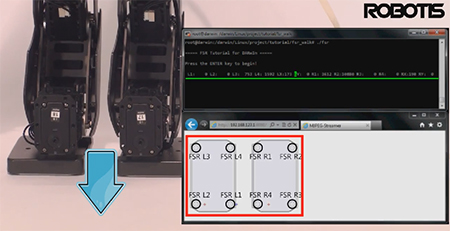
オプションの FSR-Embedded Foot Set(力覚センサー組込足裏セット)を装着することによって、より高度なダイナミクスの研究が可能になります。
抜群の運動性能
各関節のアクチュエーターにはROBOTIS社の研究者向けサーボモータ「MX-28T」を採用、高性能のサーボと競技用ロボットからの流れを汲む堅牢なフレーム設計によって高い運動性能を誇ります。その性能はROBO CUP世界大会 小型ヒューマノイドリーグで2011年から2013年まで3連覇の成績を収めていることが如実に表しています。
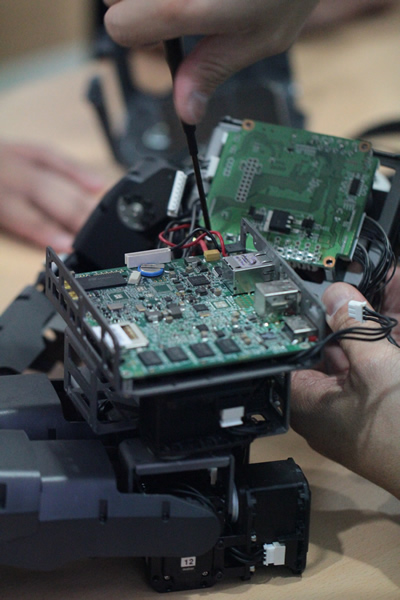
高いメンテナンス性
全身を各要素に簡単に分解することが出来ます。特に手足や胴体、首の駆動関節はサーボモータがモジュールとして組み込まれており、万が一の故障の際にもねじを数本外しサーボモータを交換するだけで、すぐに修理が可能です。また、サーボモータMX-28Tはキャリブレーション済みで出荷されていますので、サーボモーター交換時にもロボットの方でトリム調整を行う必要はありません。
DARwIn-OP 関連商品紹介
それぞれの価格は弊社webshopに掲載しております。
  |
■品名:DARwIn-OP DeluxEdition |
  |
■品名:DARwIn-OP Academic |
DARwIn-OP 機能拡張オプション
 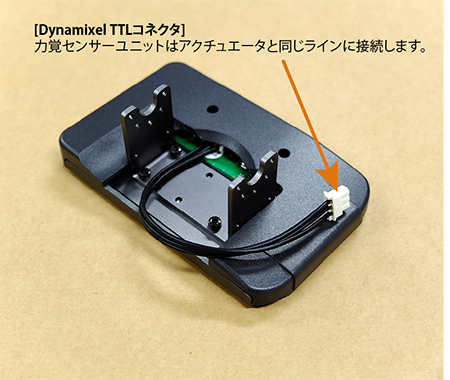 |
■品名:DARwIn-OP FSR-Embedded Foot Set(L/R) 力覚センサー組込足裏セット |
1.jpg) |
■品名:DARwIn-OP Gripper Arm (5DOF) |
1.jpg) |
■品名:DARwIn-OP Gripper Arm (4DOF) |
DARwIn-OP 保守用オプション
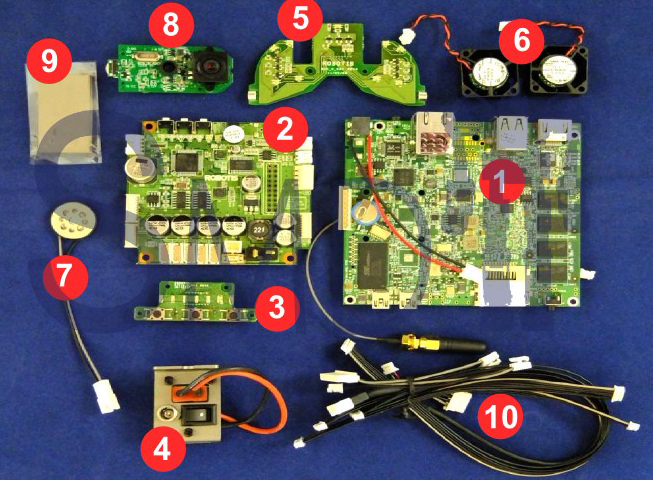   |
■品名:DW-EK01 DARwIn-OP電装キット 「CM-730」
|
 |
■品名:Dynamixel MX-28T リテールパッケージ |
 |
■品名:Dynamixel MX-28T バルク6個セット |
DARwIn-OPのご購入は正式販売代理店の弊社まで

■DARwIn-OP認証パートナー企業
弊社、有限会社杉浦機械設計事務所(SMD)はDARwIn-OPの製造元であるROBOTIS社とパートナーシップ契約を締結した正式代理店です。
![]()
DARwIn-OP認証パートナーマーク
■ROBOTIS社との協力関係
弊社は長年にわたりROBOTIS社と同社の看板製品であるDYNAMIXELアクチュエータのR&Dに関する協力関係にあります。そのため、日本国内でDYNAMIXELのサポートを手がけており、DARwIn-OPに関しても同様に質の高いサポートが可能です。
■弊社の技術
弊社はDynamizer(ダイナマイザー)シリーズに代表されるDARwIn-OPと同種の小型二足歩行ロボットを研究開発、運用してきたことによって培った技術やノウハウを有しております。
企業、学校、研究機関等法人様の購買関係ご担当への案内
弊社はこれまでに多くの企業、学校、研究機関様とのロボティクス製品の取引実績がございます。
財務・経理部署との契約、各種書式の発行や掛売りなどのお取引条件に対応可能です。
DARwIn-OPを持参してのデモは応相談です。横浜の弊社にお越しいただいての見学も随時受け付けております。
お問い合わせ窓口
お見積もり、ご質問などお問い合わせはこちらから
